PythonLinearNonlinearControl
PythonLinearNonlinearControl is a library implementing the linear and nonlinear control theories in python.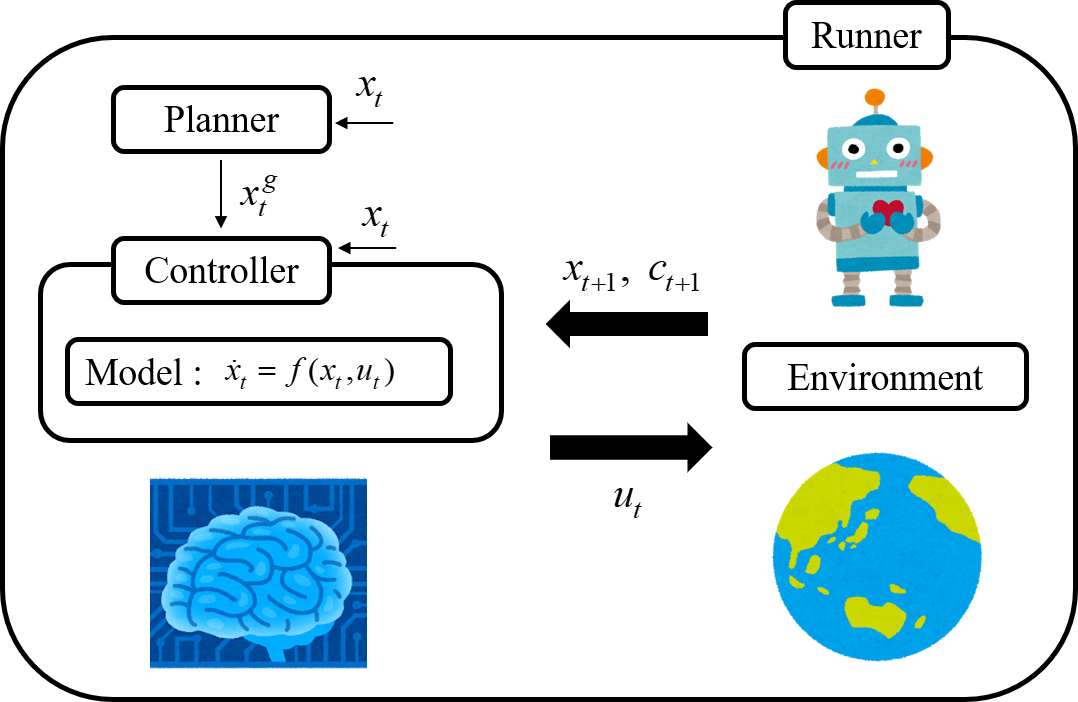

PythonLinearNonlinearControl is a library implementing the linear and nonlinear control theories in python.
I’m watching the lectures of reinforcement learning and summarizing them in Japanese.
I explained several RL papers and RL algorithms.
Published in Robotics and Autonomous Systems, 2020
This paper is about the optimal control method for the human-following robot
Recommended citation: Sekiguchi, Shunichi, et al. "Human-friendly control system design for two-wheeled service robot with optimal control approach." Robotics and Autonomous Systems 131 (2020): 103562. https://www.sciencedirect.com/science/article/abs/pii/S0921889020304024
Published in 2021 IEEE International Conference on Robotics and Automation (ICRA), 2021
This paper is about the optimal control method for the human-following robot
Recommended citation: S. Sekiguchi, A. Yorozu, K. Kuno, M. Okada, Y. Watanabe and M. Takahashi, "Uncertainty-aware Non-linear Model Predictive Control for Human-following Companion Robot," 2021 IEEE International Conference on Robotics and Automation (ICRA), 2021, pp. 8316-8322, doi: 10.1109/ICRA48506.2021.9561974. https://ieeexplore.ieee.org/document/9561974
Published in arxiv preprint, 2023
We propose a robot system and method that incorporates naming with appearance of the objects in advance, so that in the later manipulation task, instruction can be performed with its unique name to disambiguate the objects easily.
Recommended citation: Nishikawa, T., Aoyama, K., Sekiguchi, S., Takayanagi, T., Wu, J., Ishihara, Y., Kojima, T. and Yokono, J.J., 2023. Naming Objects for Vision-and-Language Manipulation. arXiv preprint arXiv:2303.02871. https://arxiv.org/abs/2303.02871